

根据定义,网格是由单元格和点组成的网络。它几乎可以有任何大小的任何形状,用于求解偏微分方程。网格的每个单元格代表方程的一个单独解,当对整个网络进行组合时,会产生整个网格的解。
由于对象内部的复杂性,解决整个对象而不将其分成更小的部分是不可能的。孔、角和角会使解算器极难获得解。另一方面,小蜂窝相对容易解决,因此是首选策略。
历史简介
网格和网格划分技术的历史与数值方法的历史密切相关。Courant、Friedrichs 和 Lewy 的论文 可以说是有限差分法 (FDM) 的基本起点,其中引入了 CFL(Courant-Friedrichs-Lewy)稳定性条件等概念。
从历史上看,矩形和笛卡尔网格与有限差分相关联,因为它依赖于相邻的单元格和节点来近似变量的行为。然而,有限元方法 (FEM) 允许使用混合类型的网格单元,从而使非结构化网格变得可行。用于解决数值问题的变分公式可以追溯到 19 世纪末至 20 世纪头十年的瑞利勋爵和里兹勋爵的著作。
介绍
数值求解一组偏微分方程 (PDE) 的第一步是方程的离散化和问题域的离散化。如前所述,一次解决整个问题域是不可能的,而解决问题域的多个小部分则完全没问题。方程离散化过程与有限差分法、有限体积法(FVM)和有限元法等方法有关,其目的是将方程取为连续形式,生成代数差分方程组。域离散化过程生成一组离散单元,因此生成覆盖连续问题域的点或节点。
根据定义,网格是连接形成网络时的一组点和单元。这个网络可以有多种形式的几何和拓扑,这将在后面讨论。通常,网格也称为网格,这通常与网格的内在组织和/或当这些网格与有限差分问题相关时。
网格的每个单元或节点都将保存方程的局部解,具体取决于方程是否在单元或节点上离散化。离散化的选择是一个项目决策。
通常,当使用有限差分法逼近方程时,会使用点离散化,其中 PDE 通常通过每个点的邻域处的泰勒级数展开来逼近。有时点离散化可以与有限体积法一起使用,但是,单元将隐式地用于点周围。
当要离散化的方程以弱形式、积分形式或保守形式考虑时,通常在离散单元上求解积分。例如,在考虑输运现象时,可以将有限体积法表示为代表小体积的离散单元。然后,可以通过这些单元平衡通量,同时假设溶液在它们内部是恒定的。
请注意,在为一个完整的单元格求解方程式时,单元格中的值是如何保持不变的。
网格类型
通常将网格类型分类为 结构化 (曲线)或 非结构化 . 如前所述,结构化网格在历史上与有限差分法相关。有限体积和有限元方法允许更一般的网格。
结构化网格
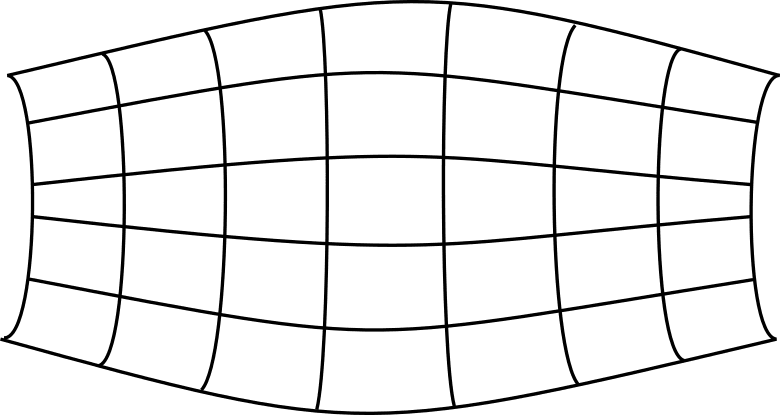
结构化网格,通常也称为网格,是一种网格,其结构和形式允许轻松识别相邻单元格和点。此属性源自以下事实:结构化网格应用于分析坐标系(矩形、椭圆形、球形等),形成规则网格。
从编程的角度来看,可以枚举形成结构化网格的单元或点,以便可以根据单元或点坐标分析地进行相邻查询。
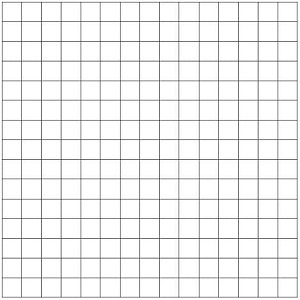
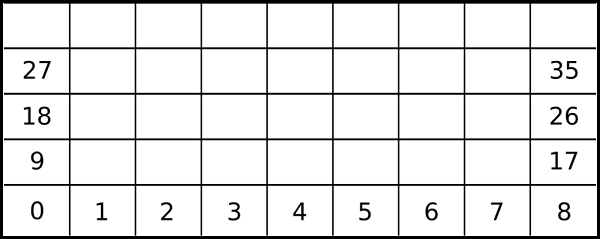
考虑下图中的网格。枚举它的第一个单元格,以及前四个左右边界单元格。该网格是矩形网格的示例。为了说明获取小区邻接的难易程度,很明显,要从任何小区获取正确的邻接,问题就简化为对它的枚举求和。类似地,任何单元格的顶部邻接都是通过将九加到单元格枚举中获得的。这允许将每个网格元素直接映射到数组或向量,从而使计算更容易。
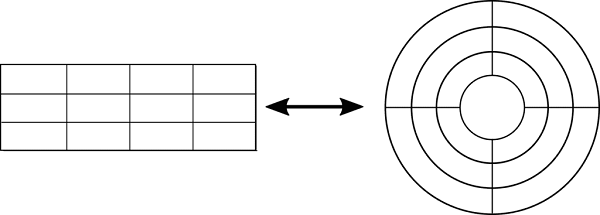
任何曲线网格都可以映射到这样的坐标和相邻系统。因此,从编程的角度来看,曲线网格和矩形网格在邻接查询方面几乎没有区别。
构化网格也可以根据边界拟合来定义。例如,笛卡尔网格适合矩形的边界,圆柱网格适合圆柱体的边界。可以混合边界拟合并使用许多不同的曲线或曲面来定义边界。这些包括任何类型的可参数化曲线和曲面,例如样条和 NURBS(非均匀有理基样条)。考虑到应为每条曲线或曲面创建多少个点,网格划分算法将决定点将如何分布在这些曲面上,以及相对曲面将如何相互连接。
非结构化网格
非结构化网格更通用,可以任意逼近任何几何形状。与坐标和连接映射到矩阵元素的结构化网格相比,非结构化网格需要特殊的数据结构,例如邻接矩阵或列表以及节点坐标列表。非结构化网格节点/单元编号可以是任意的和稀疏的,因为它不需要任何分析形式的邻接查询。

无法在其中生成结构化网格的复杂几何形状可以使用非结构化网格划分技术进行离散化。非结构化网格的灵活性允许在同一网格中使用和共存各种单元类型,从而可以实现更好的几何拟合和整体元素质量。
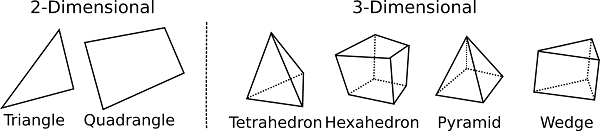
细胞类型可以分为二维细胞和三维细胞。常见的二维细胞类型是三角形和四边形。常见的 3 维细胞类型是四面体和六面体,但也可能包括金字塔和楔形。这些单元类型形成有时称为 有限元动物园的单元 ,因为这些单元类型通常用于有限元方案。众所周知,有限体积方案在使用的单元类型方面更加灵活,有时允许任何类型的多边形和多面体。
网格单元不需要保形。不一致的网格是出现悬挂节点的网格。这些节点在网格自适应过程中更常见。

网格适配
由于在非结构化网格上,点和邻接点不遵循任何类型的全局结构,因此也可以添加或删除网格单元和点。动态添加、删除或移动网格单元和点的过程称为 网格自适应。
根据问题的性质,需要网格自适应技术来获得准确的解场,同时通过控制网格单元和节点的总数来保持较低的计算成本。通常,所需的细化程度与误差相关,误差是根据要求解的方程估计的。因此,误差较高的区域最终会累积更多的网格单元。
网格细化分为几种通用类型。最常见的是,这些类型被称为 h 型、r 型、p 型、去定义以及它们的组合。
网格细化和去细化
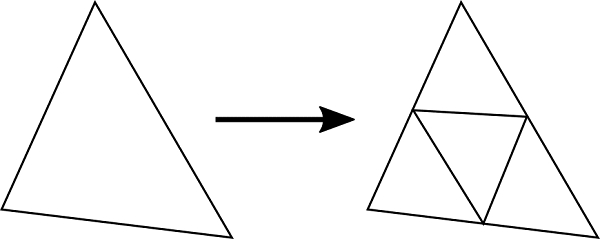
网格细化,也称为 h 型细化,是基于单元格或点的添加,减少边缘的局部特征长度。这种技术可以廉价地增加局部网格分辨率,但也会增加要求解的联立差分方程的数量,因为它增加了系统的自由度。
在非结构化网格上,添加单元或点很简单,因为它涉及重新连接修改后的单元。结构化网格的细化并不简单,因为添加单元可能会破坏网格规则。在使用自适应结构化网格时,允许不一致的网格是很常见的。
类似地,网格细化技术通常允许网格去细化,这可用于减少估计误差非常低的区域中的单元数。这允许更有效地使用计算能力,从而降低成本和模拟时间。
网格运动
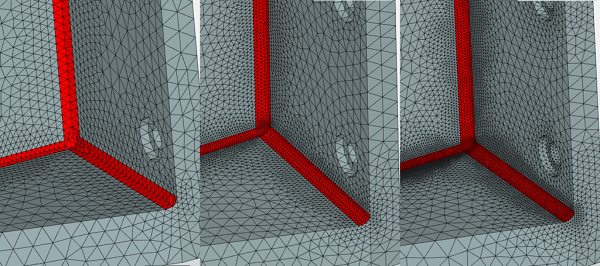
网格移动或 r 型细化是通过网格单元和点的移动或位移完成的。在这种情况下,单元格和点的数量保持不变,同时有时也保持连接相同。
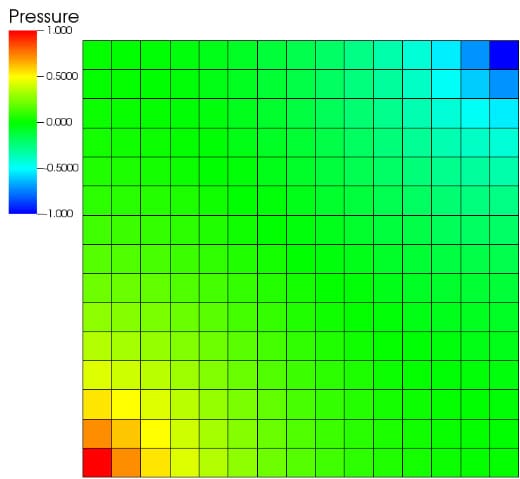
下面描述了一个 r 型网格细化过程的示例,该过程可能与冲击波传播问题有关,例如,在解的高变化区域中网格分辨率保持较高。

其他网格自适应技术
其他常见的网格自适应技术可能包括 p 型细化和自适应重新网格化。在与有限元方法相关的 p 型细化上,形状函数的复杂性增加,同时保持相同的网格。自适应重新网格划分技术用于根据估计误差生成新网格。这样可以获得最佳的整体网格质量,并且可以使用更少的点。另一方面,网格创建的开销可能很大。可以在局部使用自适应重新网格化,仅在估计误差过高或过低的区域生成新网格。
可以使用上述技术的组合。例如,r 型和 h 型细化的组合可以称为 rh 型细化,其中节点可以在网格上移动或创建。
以上就是本篇的关于网格的的介绍,想了解更多CAE相关信息 欢迎扫码关注小F(ID:iamfastone)获取
我们有个 为应用定义的研发云平台
集成多种行业应用,大量任务多节点并行
应对短时间爆发性需求,连网即用
跑任务快,原来几个月甚至几年,现在只需几小时
5分钟快速上手,拖拉点选可视化界面,无需代码
支持高级用户直接在云端创建集群
扫码免费试用,送200元体验金,入股不亏~

更多电子书
欢迎扫码关注小F(ID:iamfastone)获取
你也许想了解具体的落地场景:
王者带飞LeDock!开箱即用&一键定位分子库+全流程自动化,3.5小时完成20万分子对接
这样跑COMSOL,是不是就可以发Nature了
Auto-Scale这支仙女棒如何大幅提升Virtuoso仿真效率?
1分钟告诉你用MOE模拟200000个分子要花多少钱
LS-DYNA求解效率深度测评 │ 六种规模,本地VS云端5种不同硬件配置
揭秘20000个VCS任务背后的“搬桌子”系列故事
155个GPU!多云场景下的Amber自由能计算
怎么把需要45天的突发性Fluent仿真计算缩短到4天之内?
5000核大规模OPC上云,效率提升53倍
提速2920倍!用AutoDock Vina对接2800万个分子
从4天到1.75小时,如何让Bladed仿真效率提升55倍?
从30天到17小时,如何让HSPICE仿真效率提升42倍?
关于为应用定义的云平台:
和28家业界大佬排排坐是一种怎样的体验?
这一届科研计算人赶DDL红宝书:学生篇
杨洋组织的“太空营救”中, 那2小时到底发生了什么?
速石科技获元禾璞华领投数千万美元B轮融资
一次搞懂速石科技三大产品:FCC、FCC-E、FCP
速石科技成三星Foundry国内首家SAFE™云合作伙伴
Ansys最新CAE调研报告找到阻碍仿真效率提升的“元凶”
【2021版】全球44家顶尖药企AI辅助药物研发行动白皮书
国内超算发展近40年,终于遇到了一个像样的对手
帮助CXO解惑上云成本的迷思,看这篇就够了
花费4小时5500美元,速石科技跻身全球超算TOP500






